 GitBucket
GitBucket
Difference of A* & Dijkstra
tag : Algorithm
author : gzy
最短路径搜索,给定了一张地图,已知起始点和目标点,求两点间的最短路径。大家比较常听到的有A*算法和 Dijkstra算法。
具体就不用多说,算法比较简单,可以看一下网上的博客(见拓展),30min就可以了解算法是如何运行的。网上也有很多开源代码,ROS也有具体的包实现。
算法差别
但是同样是找最短路径,这两种算法有什么不同?这是我主要的疑惑点。我是这么找到答案的。
首先,我知道ROS Navigation Stack之前用到了轨迹规划的包叫做Navfn,看网上评论大家似乎用的比较顺手。看了Navfn的官网,支持Dijkstra但是不支持A 。我觉得这个回答可以接受,但是具体性能如何,还要根据实际情况判断,比较A的性能和启发函数相关,不能一概而论。
被搜索图的差别
另一个疑惑点是,这两个算法使用的map不太一样。A* 使用的是网格图,每个网格代表一个位置,在简介中,网格不带cost,在网格间移动会产生cost。而Dijkstra使用的是“图”数据结构,每个顶点是一个位置,沿着边移动会产生cost。

使用A搜索的 *网格图

使用Dijkstra搜索的 图
但是仔细一想,这两种地图可以相互转化的。如果要进行图搜索,那A 用的网格图可以转化为图,只需要把每个网格变成图的顶点,相邻网格之间连上cost为1的边即可;如果要在网格图里进行路径搜索,Dijkstra使用的图也可以具体化为网格图的,只需要让每个顶点的度变成4,每个边的移动cost变成1就相当于*网格图了。
算法和实际ROS实现的差别
但是再仔细一想,还是有点不太对劲,即使沿路移动的cost被计算进去了,但实际ROS中,对环境感知后得到的cost map却比这个还要多一个东西,就是每一个点上的cost。不仅沿着路移动会有cost,进入下一个点cost也会产生cost。这个是合理的,因为有的点是障碍物,cost极大,虽然向那个点移动可能不花费cost,算是踩到那个点相当于撞墙,所以cost极大,这可以帮助机器人避开不合理的点。
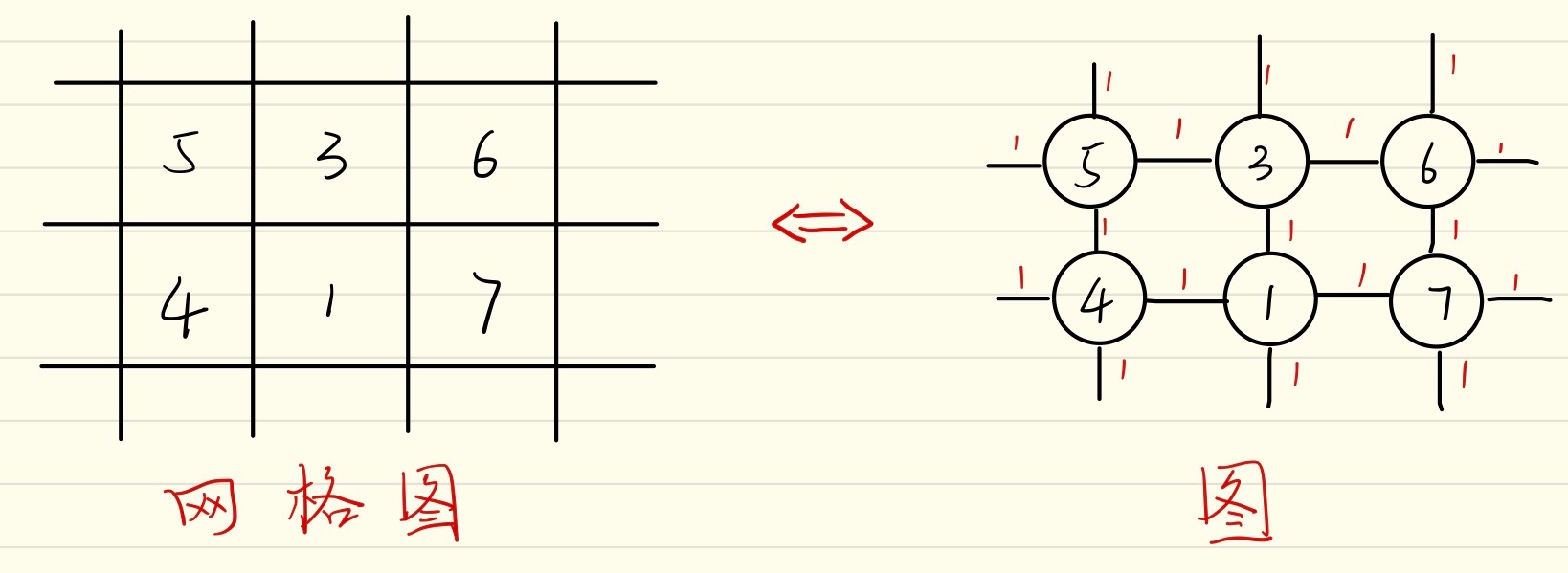
网格图和图的转化
所以ROS对上述算法是实现中还做了一个小改动,就是将移动的cost和将要踩到的下一点的cost融合成为一个叫做potential的值,利用这个potential进行排序选择真正的下一点。
拓展
Dijkstra算法详解,虽然写的并不太好,不失为快速了解的好方法
A*,一个有趣又简单的举例解释。
只有Dijkstra的navfn已经不多用了,现在用的更多的是实现了A*和Dijkstra的ROS包global_planner